| Определение места радионавигационными средствами |  |
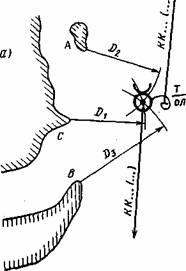
Для надежного определения места с помощью РЛС необходимо быть уверенным в правильном опознании объектов, наблюдаемых на экране индикатора. Наиболее точно могут быть опознаны объекты, называемые точечными ориентирами. К ним относятся обозначенные на карте небольшие островки, отдельно лежащие камни, скалы, плавучие знаки навигационного ограждения, оконечности молов и причалов, а также радиолокационные маяки-ответчики. Хорошее изображение, отвечающее по форме очертаниям берега на карте, дают высокие обрывистые берега. Такой берег может быть опознан достаточно уверенно. Низменные песчаные мысы, плоское побережье, покрытые снегом пологие берега, плавучий лед рассеивают энергию и могут не давать эхо-сигналов. В результате этого возвышенные полуострова, соединяющиеся с основным берегом низкими перешейками, могут изображаться на экране РЛС как острова. Если мыс имеет пляж, за которым лежит обрывистый склон, то при пеленговании или измерении расстояния до такого мыса легко ошибиться, так как урез воды на определенных расстояниях радиолокатор не обнаружит. Ошибки при измерении расстояний до берега особенно вероятны в морях, имеющих низкие берега и значительные колебания уровня воды. Обычно уже на расстоянии от 15 до 8 миль изображение на экране индикатора достаточно верно передает очертания береговой черты, что позволяет сопоставлять его с картой. Для определения места могут быть использованы радиолокационные расстояния до опознанных на экране РЛС объектов или пеленги этих объектов. Радиолокационное измерение расстояний в большинстве случаев производится с помощью подвижного круга дальности (ПКД). Расстояние до объекта можно определить также на глаз по неподвижным кругам дальности (НКД). При этом способе ошибка расстояния составляет в среднем 0,1 интервала между соседними кругами. Для повышения точности наблюдений расстояния следует измерять до выдающихся частей берега, направленных к судну. Радиолокационные пеленги измеряют при помощи механического или электронного визира, устанавливаемого над серединой эхо-сигнала. Истинный пеленг на объект находят затем путем исправления радиолокационного .пеленга поправкой гирокомпаса. Если РЛС не имеет ориентации по норду, то измеряют КУ эхо-сигнала, который переводят в ИП. Пеленги следует брать на обрывистые оконечности, направленные перпендикулярно к визирной плоскости. Ошибка в пеленге будет тем меньше, чем дальше располагается эхо-сигнал от центра экрана, поэтому при взятии пеленгов следует использовать шкалу наиболее крупного масштаба. В большинстве случаев точность радиолокационного измерения расстояний значительно выше точности радиолокационного пеленгования, что необходимо иметь в виду при определении места судна. Только на малых расстояниях, не превышающих 0,5 мили, линия пеленга не уступает по точности измеренному расстоянию. Определение места судна по радиолокационным расстояниям. Если на экране РЛС можно выбрать два или три удачно расположенных точечных или характерных ориентира, то место судна может быть получено по измеренным до этих ориентиров радиолокационным расстояниям. Проведя радиолокационные наблюдения, находят на карте ориентиры, соответствующие эхо-сигналам, от которых наносят вблизи счислимого места судна засечки радиусами, равными измеренным расстояниям в масштабе карты. Место судна получают в пересечении засечек (рис. 1, а). Если на экране индикатора имеется изображение ровной береговой черты, не имеющей характерных выступающих мысов, и одного точечного ориентира, то место судна получают следующим приемом (рис. 1, б).Измерив расстояние D1 до точечного объекта, подводят подвижной круг дальности касательно к кромке берега, т. е. измеряют кратчайшее расстояние D2 до береговой черты. От точечного ориентира радиусом D1 проводят на карте дугу аа/. Взяв циркулем расстояние D2, находят на дуге аа/ такое положение острия циркуля, при котором карандаш опишет окружность bb/,касательную к береговой черте. Место накола острия циркуля будет соответствовать положению судна. Полученную с помощью РЛС обсервованную точку обозначают кружком с полукругом над ним. Во всех случаях судоводитель должен стремиться определять место судна по трем расстояниям, что дает возможность по величине треугольника погрешностей выявить возможные ошибки в наблюдениях или опознании объектов. Для уменьшения ошибок от неодновременного измерения расстояний рекомендуется первыми измерять расстояния до объектов, находящихся вблизи траверза. В последнюю очередь измеряют расстояние до ориентиров, расположенных на курсовых углах, близких к 0 и 180°, замечая время и отсчет лага.
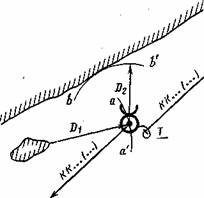
Рис. 1. Определение места судна:  Определение места судна по радиолокационному расстоянию и визуальному пеленгу. На практике широко применяют комбинированный способ определения места по радиолокационному расстоянию и визуальному пеленгу. Если пеленг и расстояние измерены до одного и того же точечного ориентира, то определение места выполняется в том же порядке, что и при визуальных наблюдениях. Часто пеленгуемый маяк располагается на мысу в некотором удалении от берега. Тогда расстояние на экране РЛС измеряется не до маяка, а до лежащей перед ним береговой черты. В этом случае измеренное расстояние откладывают по линии пеленга от уреза воды. Когда в районе пеленгуемого объекта берег не имеет характерных ориентиров, измеряют кратчайшее расстояние Dдо береговой черты. Исправив и проложив на карте линию визуального пеленга(рис. 2), растворяют ножки циркуля в масштабе карты на расстояние D. Находят такое положение острия циркуля на линии пеленга, при котором вторая ножка опишет дугу, касательную к береговой черте. Место судна будет находиться в точке накола острия циркуля. Радиомаяки и их типы. Морские радиомаяки представляют собой радиопередающие устройства, имеющие строго фиксированное положение и передающие в соответствии с расписанием присвоенные им позывные и специальные радиосигналы. В практике судовождения применяются радиомаяки с ненаправленной или направленной характеристиками излучения. В первом случае для их использования на судне требуется радиопеленгатор, во втором достаточно наличие обычного судового приёмника соответствующего диапазона. Основным параметром, определяющим тип радиомаяка, является его характеристика излучения. Наиболее широко используются следующие типы: 1. Радиомаяки кругового излучения (ненаправленные); 2. Створные радиомаяки; 3. Секторные радиомаяки; 4. Радиомаяки с вращающейся характеристикой направленности. Радиомаяки кругового излучения предназначаются для обеспечения навигационных определений в море с помощью судовых радиопеленгаторов. Маломощные маркерные радиомаяки используются, как правило, для обозначения навигационных опасностей или других пунктов, на которых они установлены. Створные радиомаяки предназначаются для обеспечения вождения судов по прямолинейным фарватерам. Принцип их действия основан на использовании метода равносигнальной зоны. Вождение по зоне осуществляется путём удержания судна в пределах зоны равной слышимости двух сигналов, передающих в "переплёт". Секторные радиомаяки с веером вращающихся равносигнальных зон по сравнению с обычными круговыми радиомаяками обладают рядом преимуществ и отличают от последних принципом действия, эксплуатационными данными и методикой использования. Достоинства секторных радиомаяков: большая дальность действия, повышенная точность пеленгования и, самое главное, отсутствие потребности в специальной аппаратуре на судне, не считая средневолнового приёмника или радиопеленгатора. При плавании вблизи берегов возникают трудности выделения и опознания сигналов навигационного знака на фоне сигналов от береговой черты или плавмаяка на фоне отметок судов. Радиолокационный маяк ответчик (РМО) представляет собой устройство, при поступлении, на вход которого импульсов судовой РЛС излучаются ответные импульсы или их кодовое сочетание. Ответные сигналы воспроизводятся на экране РЛС, позволяя определить местоположение и принадлежность маяка. В настоящее время получили широкое распространение РМО с медленной перестройкой рабочей частоты в диапазоне 9320 - 9500 МГц (3 см) используемой для работы судовых РЛС всего мирового флота. Сигналы РМО наблюдаются только в те промежутки времени, когда частота РМО совпадает с частотой РЛС. Период изменения частоты РМО составляет 1,5 - 2 мин. Поэтому сигналы РМО наблюдаются в течение 2 - 3 оборотов антенны каждые 1,2 - 2 мин. Сигналы РМО представляется в виде сплошной радиальной линии длительностью около 4 миль. Дальность их обнаружения в зависимости от технических параметров 15 - 30 миль. При использовании РМО дистанция измеряется по началу отметки, затем учитывается задержка сигнала по характеристике маяка. |
ЗОЛОЧЕНИЕ в Мурманске!!!
Покрытие золотом любых металических покрытий. Восстановление позолоты на часах и ювелирных изделиях. Позолота серебряных вещей. Золочение автомобильных эмблемм и хромированных частей.
ДОБАВЬТЕ ЗОЛОТА В СВОЮ ЖИЗНЬ!
тел. +7 931 805 79 96
тел. +7 911 062 41 79